机场 24x24 像素显示单元 Airport 24x24 Dot Matrix RGB Character Display Unit
| Commit | Date | Commit Message | |
|---|---|---|---|
cecb5a8 |
2024-08-20 15:41:40 +0800 | fix: typo | View this version |
9b7f283 |
2024-08-20 15:28:14 +0800 | new post | View this version |
之前在咸鱼 App 上收了 3 个 24x24 像素的机场 RGB 点阵显示单元, 大概是这么个东西:
这种显示单元在机场的航站楼里面经常见到,用来显示航班信息, 一个单元显示一个汉字. 常见是红色或黄色单色字符, 特点是显示效果非常醒目.

听商家说, 这一批屏幕来自于浦东机场. 大概是机场航班信息显示屏幕的一部分. 如上图, 一个汉字正好使用一个显示单元. 字体边缘清晰, 亮度高.
简单搜索发现相关似乎 IC 资料能搜到, 猜测驱动应该不难, 所以当时就收了下来. 垃圾佬的特色就是赌.
介绍
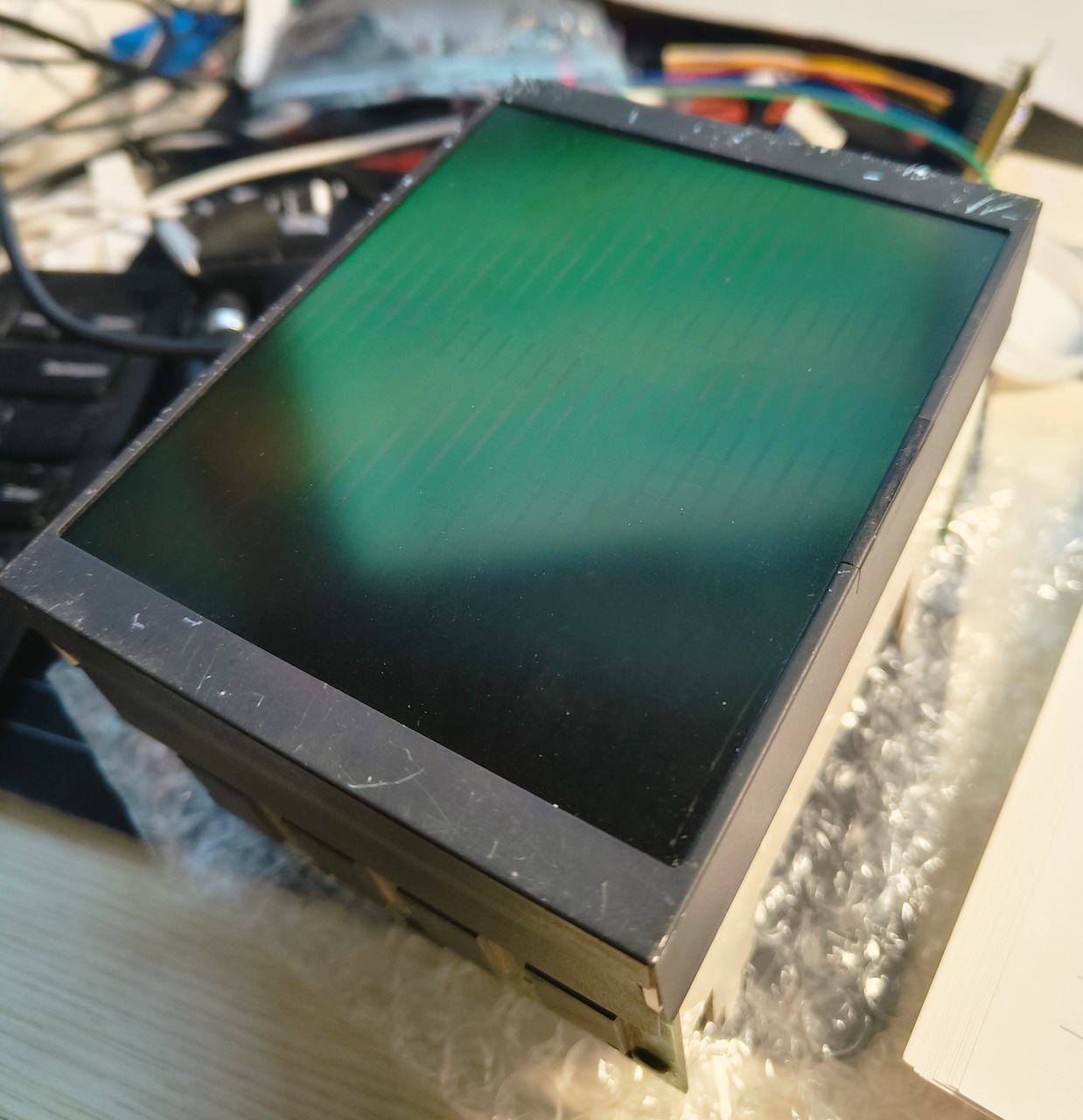
整个显示单元成色还可以, 但设备常年在较恶劣使用环境下工作, 有不少陈年灰, 需要清理.
正面稍有岁月痕迹, 外壳有些许运输划痕, 但屏幕成色很好. 屏幕隐约能看到大块的像素点.

背后是巨大的散热金属片, 用于给 RGB 背光驱动板散热. 说明 RGB 背光板功耗不小, 提醒我们不要直接用单片机驱动. 从背面的文字可以确定屏幕型号是 KD54008-L025. 同时插座文字可以确定屏幕的上下方向. 左右两侧有三个 PH2.0 接口, 用于背光级联驱动和背光电源. PCB 上有标注, 但被散热片遮挡不容易看到. 背光板上有三个电位器可以调整 R, G, B 的亮度.
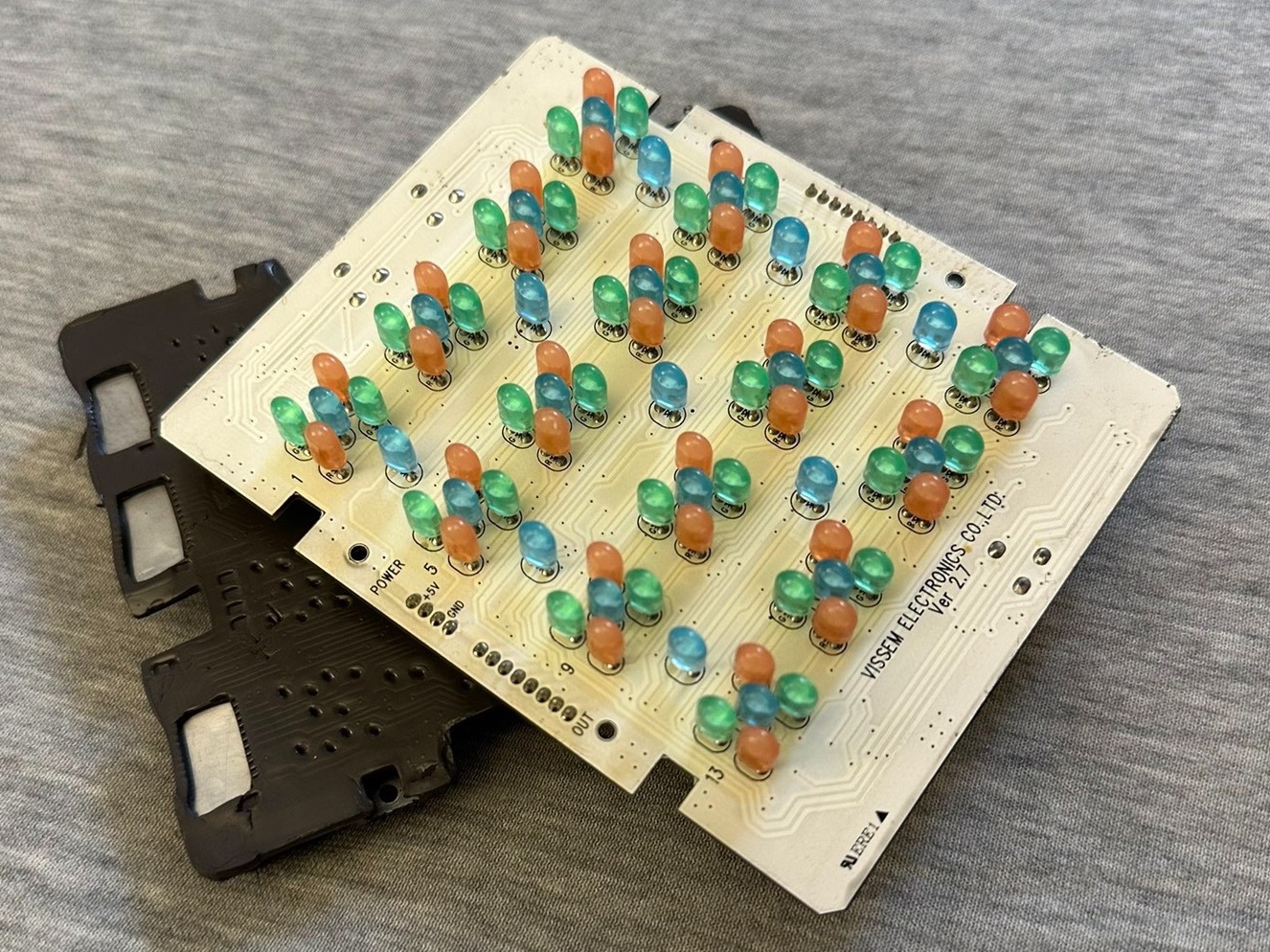
拆掉后可以看到背光 RGB 灯珠, 分十六组, 使用移位寄存器驱动, 即完全改变一片背光板的颜色, 需要通过移位16次.
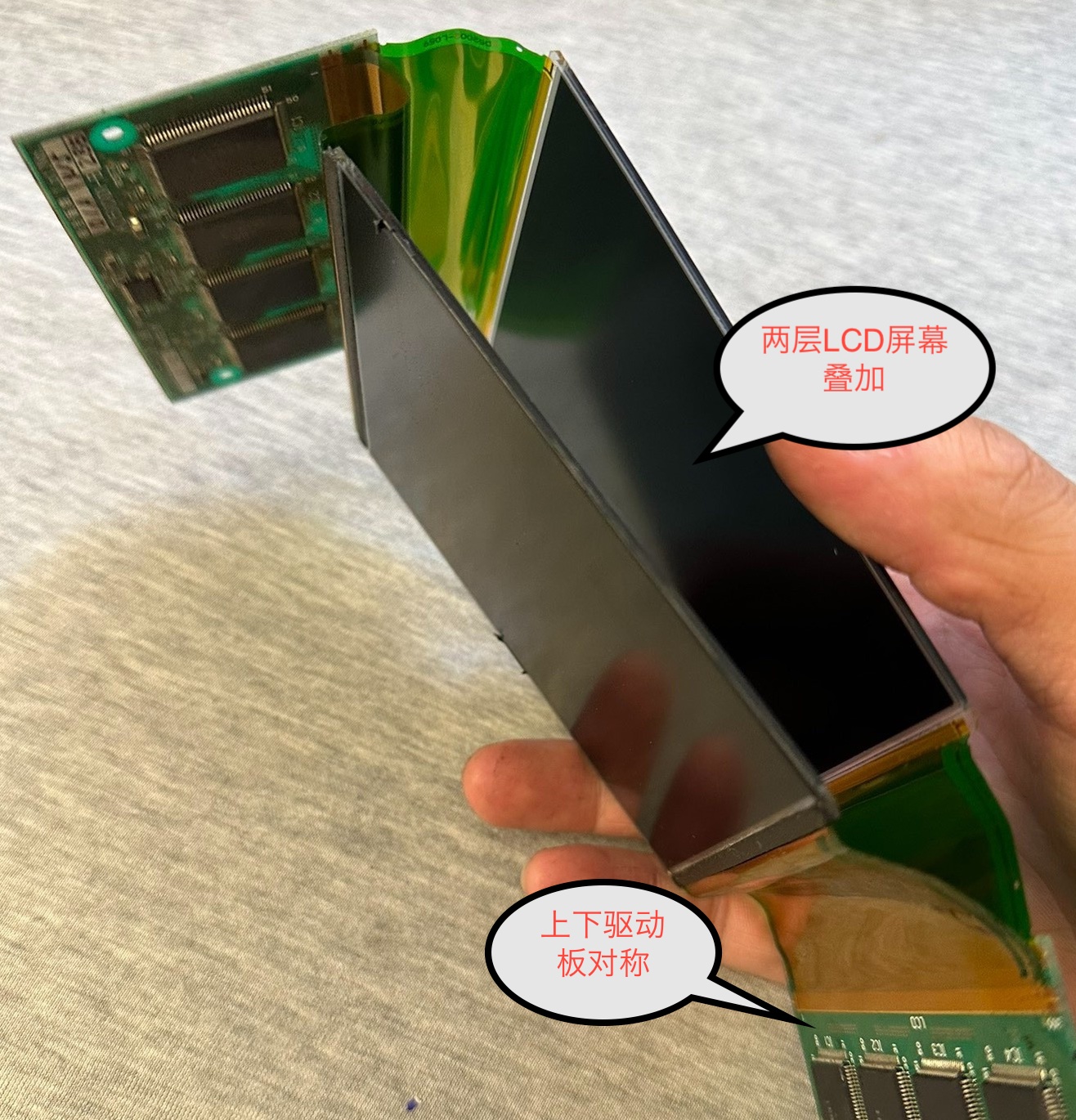
屏幕是两层静态 TN, 每一层都是 24x24 像素, 相同. 这种屏幕的特点是响应速度快, 高对比度, 叠两层对比度更高. LCD 驱动板分上下两块 PCB 板, 每块板四个 LCD 驱动芯片 LC7931 级联. TSSOP20 封装的是 74HC245, 用于级联信号驱动能力. 上下两块驱动板的布局近似, 但移位方向和屏幕像素连接稍有不同, 基本上是镜像对称的. 这里放上板的图:
每块驱动板背后有两个 10pin 接口, 用于级联和电源. 10pin 接口是超薄接插连接器, 不是常见的型号, 但可以用 MX1.25-10P 超薄接头兼容.
折腾这种东西像是在复习自己当年的数字电路知识, 高低电平, 时钟, 包括移位寄存器, 锁存器等等.
电路部分
掏出家家必备的万用表开始, 一顿测. 背光驱动板因为接口有标注, 可以直接给驱动信号. LCD 驱动板稍微复杂一点, 但你只需要一个周末的下午. 有一些常用的经验:
- 如果外壳或安装孔接地, 可以很容易确定地线和电源
- 从已知芯片和资料比较完善的芯片开始, 检测信号引脚, 例如 74HC245
- 级联式组合的芯片走线一般都比较有规律, 可以大致猜测
背光和LCD驱动是两部分独立的电路,分别处理。
LCD 驱动板
单个单元有上下两块驱动板, 分别用于上下两半屏幕. 两块驱动板的布局近似, 但移位方向和屏幕连接稍有不同, 基本上是镜像对称的.
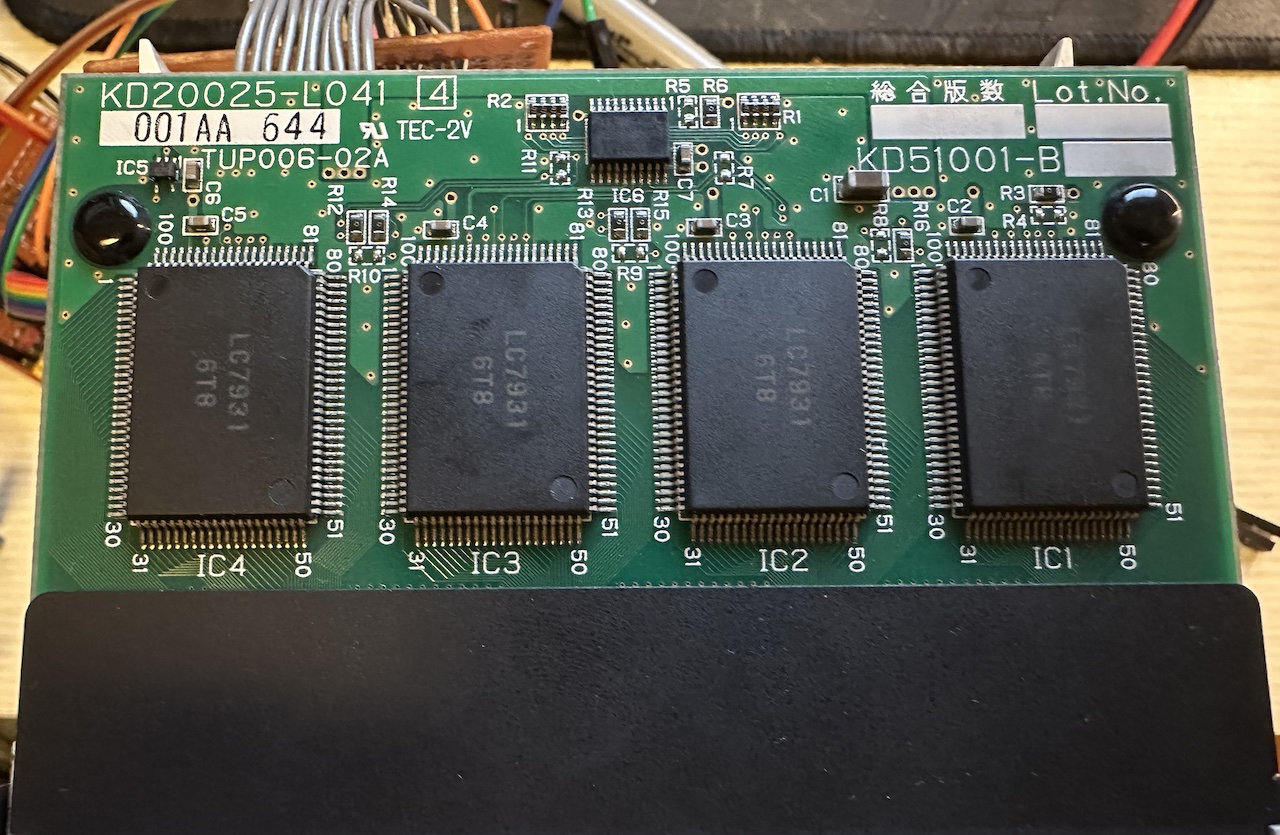
以上板为例(01A):
- 4 片级联 LC7931, 用于驱动屏幕, 三洋的 80-channel Liquid-crystal Display Driver
- 1 片 HC245A , 即熟悉的 74HC245, Octal 3-State Noninverting Bus Transceiver, 三态 8 位总线收发, 用于驱动信号和级联信号的 buffer, 增加级联信号驱动能力
- 两个超薄 10pin 板对线接插连接器, 不是常见的型号, 能近似兼容的信号是 MX1.25-10P 超薄接头(必须是超薄)
通过分析74HC245三态8路总线收发芯片的使用情况,可以快速判断该PCB的供电和信号线路。74HC245的使能信号和方向信号均接地,说明它被当作一个普通的缓冲芯片使用,用于增加级联信号驱动能力.
74HC245的8路信号输入输出分别引向其他部分。由于LTC7931支持级联, 需要4条信号线控制, 因此可合理猜测这8路信号是用于TC7931的级联输入输出信号.
LTC7931是 80 通道液晶显示驱动芯片,用于驱动LCD的的像素点。引脚较多, 需要慢慢对应到接插件端口上. LC7931 手册很详细, 是影印版的 PDF. 我们常把这种显示单元称为 “段码屏”, 屏幕被分成了很多 “segment”, 具体组织方式可以是规则矩阵排列, 也可以是类似数码管, 比如常见的七段数码管就是一种 segment display.
忽略74HC245, 简化电路示意图如下:
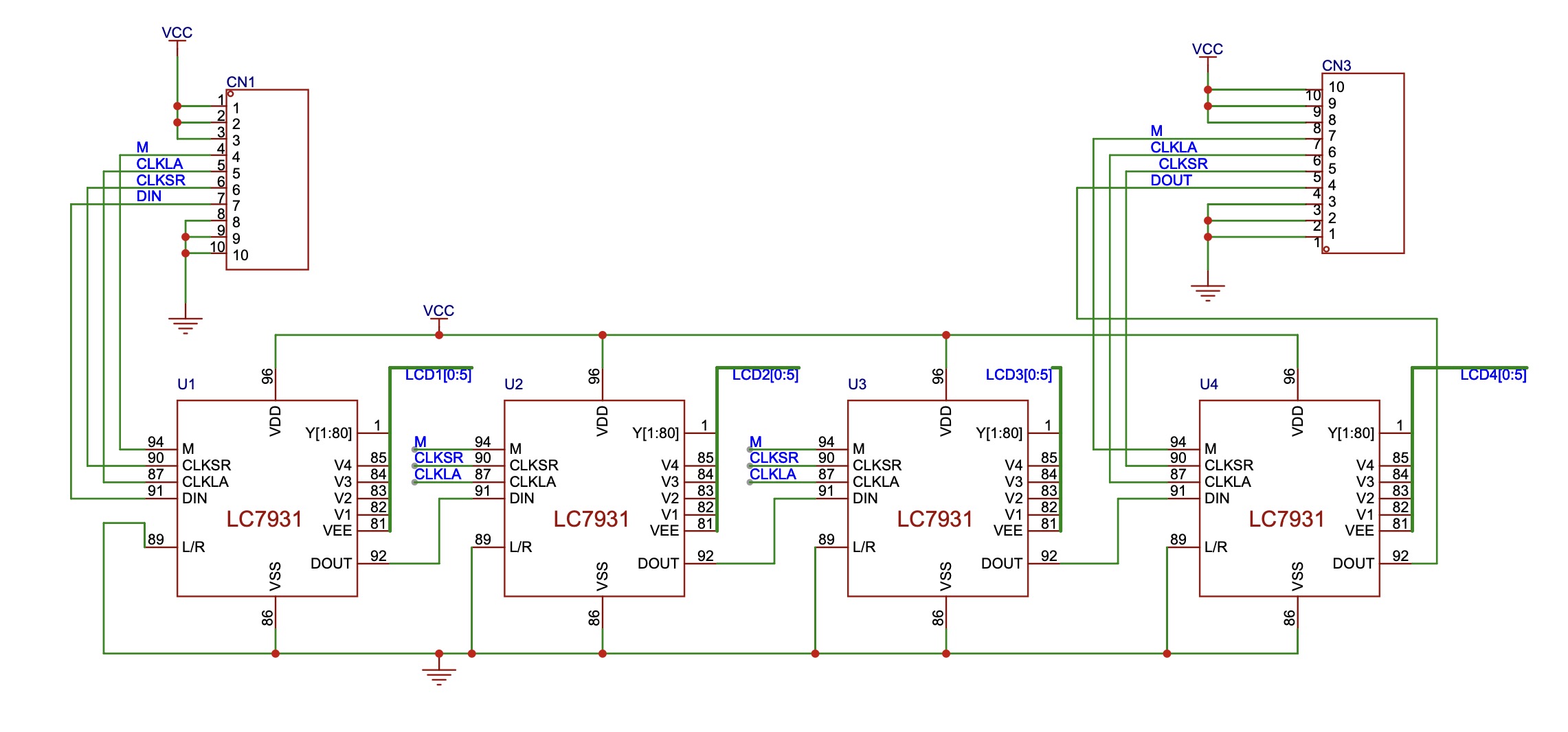
主要是级联和接插件的信号输入输出。上下两块驱动板的四个接口的GND均位于显示单元外侧,电源输入位于靠模块中间一侧。
具体的像素布局需要在代码中一位一位修改尝试, 这里我结合了代码和万用表, 屏幕布局大概是:
- 屏幕上半部分像素 width=24, height=12, 由 4 片 LC7931 驱动, 级联方式
- 每片 LC7931 驱动 72 个像素点(segment), 80-bit 输出的高八位为 NC
- 72 个像素点正好是 6 列, z 字形排列, 12 行
- 屏幕下半部分与此镜像对称, 所以成了 80-bit 输出的低八位 NC
- 上下两块驱动板的布局通过跳线电阻选择移位方向, 所以大概是:
(Back View)
+--CN0------------CN1--+
| A1 -> A2 -> A3 -> A4 |
| |
........................
| |
| B1 -> B2 -> B3 -> B4 |
+--CN0------------CN1--+
其中每个 Ax, Bx 表示单片 LTC7931 驱动的 72 个像素点, 也就是 6 列 12 行的像素点.
CLKSR 是移位寄存器时钟, 最高 1MHz, 计算可以得到, 80 segment 驱动, 一个屏幕 8 片 LC7931, (1 MHz / (80 * 8) = 1562 Hz) 理论最高一个单元屏幕刷新率, 3 个级联的话就是 320 Hz. 速度还可以. 对于机场静态文字来说, 这个速度是足够的.
背光电路
背光板上的 16 组 RGB LED, 每组若干高亮三色 LED, 通过移位的方式逐渐驱动, 一个单元有三个连接器. 很常见的 PH2.0.
- CN1: 电源输入, 5V, GND, 实测单个单元最高电流可达 1A 以上, 常见单片机板子 5V 直接驱动可能过流烧坏电路!!
- CN2: 驱动信号输出, 用于级联
- CN3: 驱动信号输入
- 3 个电位器旋钮, 分别用来控制 R, G, B 的亮度, 方便调整颜色一致性
CN2, CN3 都是 8pin PH2.0 接插连接器. CN3 输入驱动信号如下:
| 自上到下 | 信号 | 说明 |
|---|---|---|
| 1 | CLK | 背光移位寄存器时钟 |
| 2 | LATCH/LOAD | 背光移位寄存器锁存 |
| 3 | EN | 背光输出使能, 低电平有效 |
| 4 | R | 红色 |
| 5 | G | 绿色 |
| 6 | B | 蓝色 |
| 7 | GND | 地 |
| 8 | NC |
电路引出
得知了接口的信息, 就可以准备转接板了. 我这里选用了常见的单面洞洞焊接板, 引出电源及 10 pin 接口到 2.54mm 排针.
Coding Time
MCU 这里选择 RPi Pico(RP2040), 开发框架选择 Rust Embassy. 它为嵌入式环境提供了方便简洁的 async/await 支持. 官方对 STM32, RP2040, NRF 等常见芯片提供了支持. 我目前正在做的 ch32-hal 项目提供了 WCH 32 位单片机的 Embassy 支持, hpm-hal 项目提供了 HPMicro 的 32 位单片机的 Embassy 支持.
我们以 Embassy async task 的方式编写屏幕相关驱动.
从官方项目仓库直接找到 examples 目录, 复制出来搞定项目模板, 开始写代码.
背光驱动
先从简单的开始, 背光的移位和锁存可以快速验证, 甚至本例中, 我是用跳线来回短接模拟时钟测试的.
LCD 像素驱动
相对来说 LCD 的驱动需要处理像素位置等信息, 额外还有 M 信号用于刷新 LCD, 相对复杂一些.
LCD M 信号的 AC 刷新, 可以使用 PWM 输出, 也可以偷懒直接用 GPIO:
#[embassy_executor::task]
async fn lcd_ac_driver(pin: AnyPin) {
let mut pin = Output::new(pin, Level::Low);
let mut ticker = Ticker::every(Duration::from_millis(10));
loop {
ticker.next().await;
pin.toggle();
}
}
移位式像素屏幕的显示内容驱动其实有完整的一个套路, 例如 WS2812 矩阵, 还有这种 LCD segment 驱动. 用 Framebuffer 是最简单的方式. Framebuffer 中字节的内容建议在空间允许的情况下, 尽可能接近最终传输输出的数据, 而不要为了方便像素写入逻辑使用复杂的发送时像素映射运算.(高速移位时候避免复杂指令对于多数低端单片机来说是必要的)
// 3 display units
// 10 byte per chip, 24 chip, 12 upper chip, 12 lower chip
pub struct Pixel24x24 {
buf: [u8; 10 * 8 * 3],
}
impl Pixel24x24 {
pub fn new() -> Self {
Self { buf: [0; 10 * 8 * 3] }
}
pub fn set_pixel(&mut self, x: u16, y: u16, on: bool) {
let x_index = x / 6;
let y_index = y / 12;
// zig-zag shape
let chip_index = if y_index == 0 { (12 + x_index) } else { (x_index) };
let start_index = 10 * (chip_index as usize);
let mut chip_buf = if y_index == 0 {
&mut self.buf[start_index..start_index + 9]
} else {
&mut self.buf[start_index + 1..start_index + 10]
};
let chip_x = x % 6;
let chip_y = y % 12;
let chip_n = chip_y + chip_x * 12;
let byte_index = (chip_n / 8) as usize;
let bit_index = chip_n % 8;
if on {
chip_buf[byte_index] |= 1 << bit_index;
} else {
chip_buf[byte_index] &= !(1 << bit_index);
}
}
}
随后实现 embedded-graphics 的 DrawTarget trait:
impl OriginDimensions for Pixel24x24 {
fn size(&self) -> Size {
Size::new(24 * 3, 24)
}
}
impl DrawTarget for Pixel24x24 {
type Color = BinaryColor;
type Error = core::convert::Infallible;
fn draw_iter<I>(&mut self, pixels: I) -> Result<(), Self::Error>
where
I: IntoIterator<Item = Pixel<Self::Color>>,
{
for Pixel(coord, color) in pixels {
if self.bounding_box().contains(coord) {
self.set_pixel(coord.x as u16, coord.y as u16, color.is_on());
}
}
Ok(())
}
fn clear(&mut self, color: Self::Color) -> Result<(), Self::Error> {
if color.is_on() {
self.buf.fill(0xff);
} else {
self.buf.fill(0);
}
Ok(())
}
}
完成 Framebuffer 之后, 驱动只需要把 FB 的内容移位输出即可:
#[inline]
fn shift_out_lsbf(p: &mut Output, clk: &mut Output, data: u8) {
for i in 0..8 {
if data & (1 << i) != 0 {
p.set_high();
} else {
p.set_low();
}
Delay.delay_us(100);
clk.set_low(); // falling edge shift data out
Delay.delay_us(100);
clk.set_high();
}
}
由此, 就可以用 embedded-graphics 的 DrawTarget trait 来驱动 LCD 了.
进阶 - Field Sequential RGB Driving
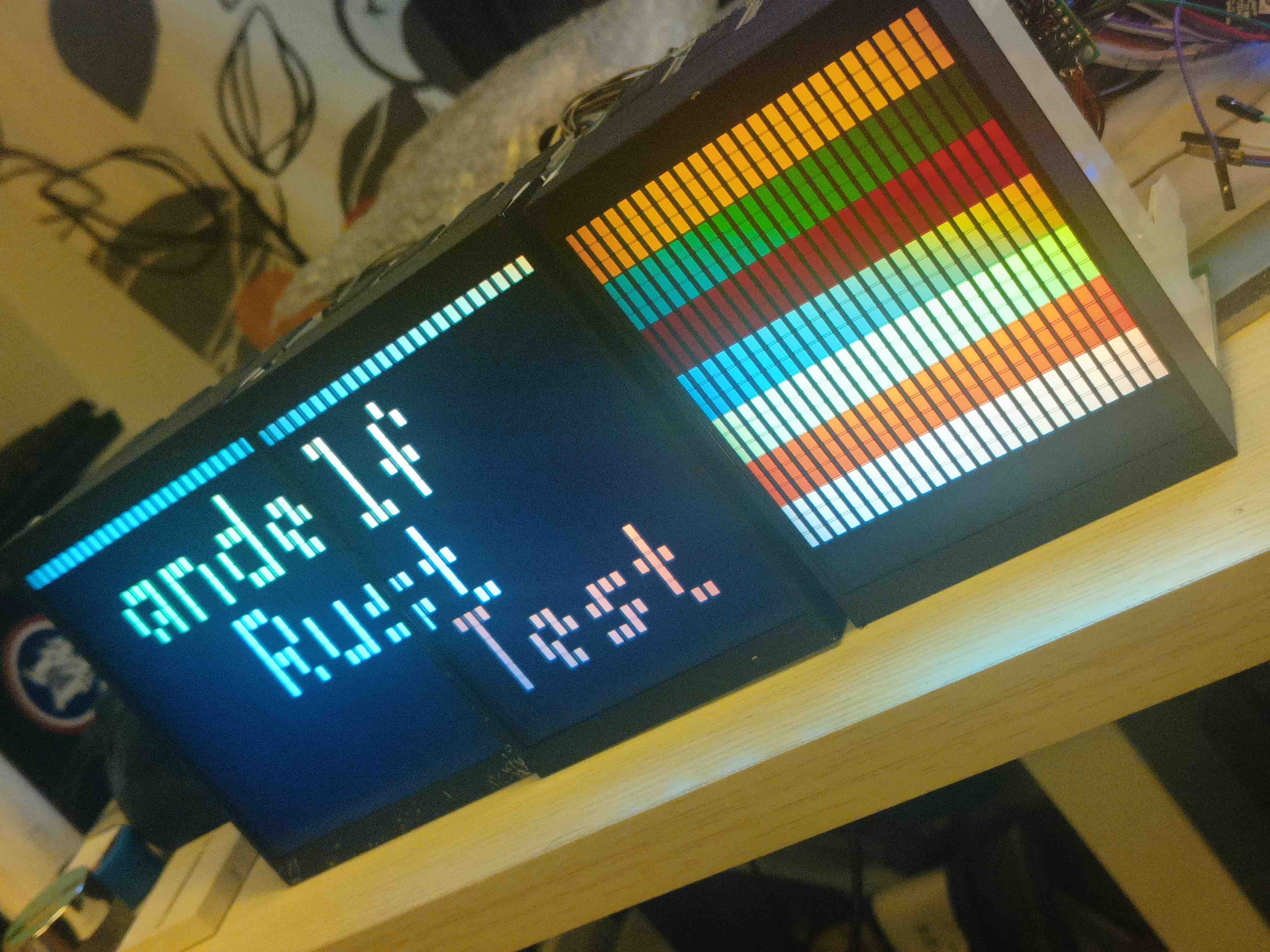
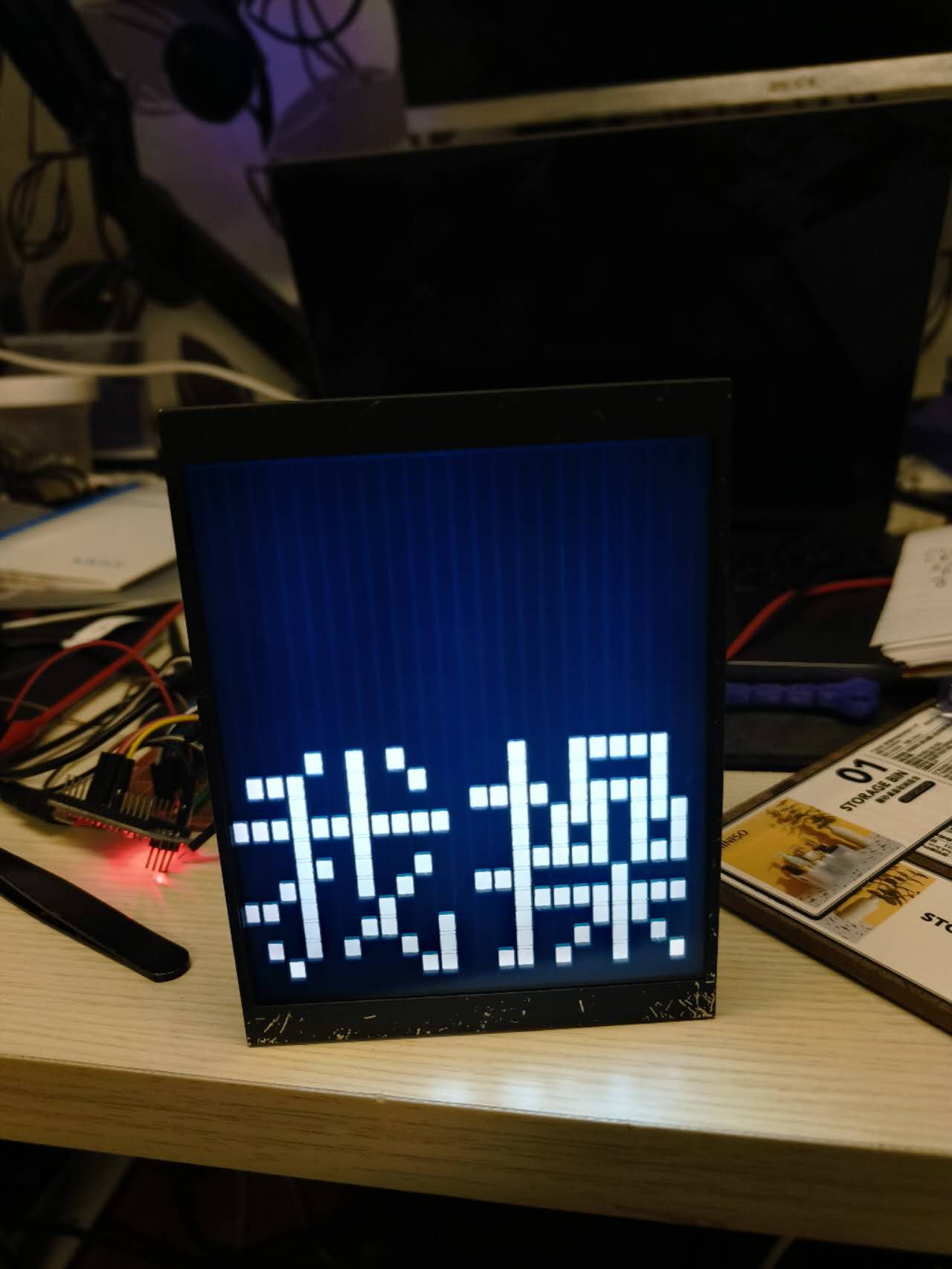
在群里经 wenting 大佬的点拨, 发现它完全可以用 Field Sequential RGB Driving, 也就是分时复用的 RGB 驱动方式, 通过快速切换 R, G, B 三种颜色的亮度来合成出各种颜色. 它与传统的像素并行驱动显示技术不同,采用时间分割方法来处理颜色。
首先显示所有像素的红色成分,然后是绿色,最后是蓝色。这些颜色的显示通常以非常高的频率交替进行,以便人眼无法察觉到颜色的切换,而是感知到这些颜色的混合效果。由于人眼具有持续性的视觉特性(视觉暂留),不同颜色的快速切换可以在观众的视觉中自然地混合起来,从而形成完整的图像。
本文配图即为这种分时复用 RGB 驱动方式的效果.
后
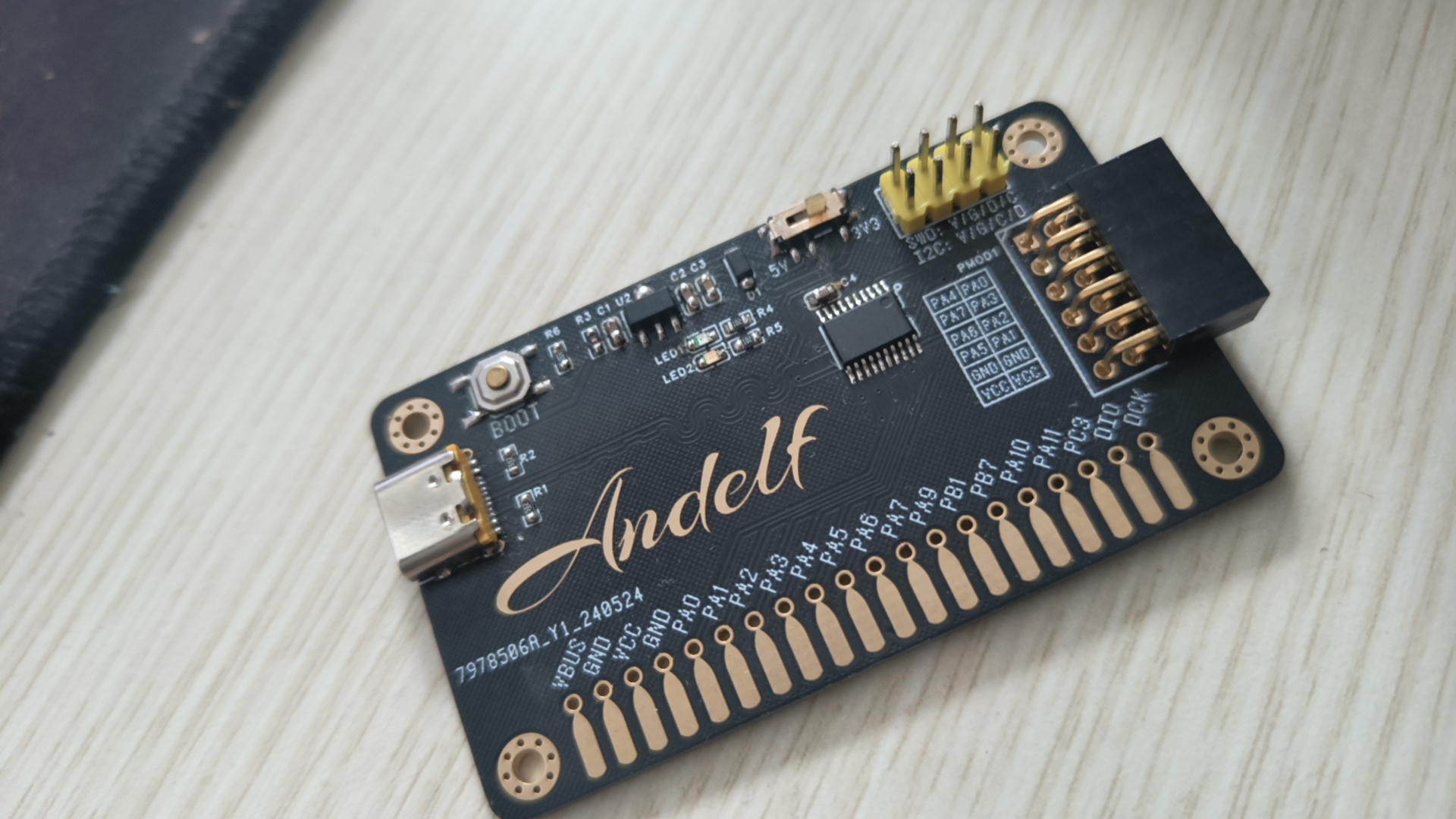
其实这个拆机折腾早在 2023 年末即完成, 只不过迟迟一直没有总结.
后来考虑到 5V 输出更稳定, 单独做了一块 CH32X033(X035) 的板子, 方便焊接排线驱动, 灵感来自 DALL-E 的一次输出, 即结合可焊接 pad 和 2.54mm 排针, 方便使用.